M. Jiřík, I. Gruber, V. Moulisová, V. Liška et al.
Oncological and surgical treatment of malignant focal processes of the liver reaches its limits in cases where the amount of affected parenchyma is too large or where the hilar structures are involved – stages at which a complete removal of the tumor tissue equals a total loss of the organ. In such patients, restoration of the liver function by means of conventional liver transplantation is generally out of the question, as it requires the administration of drugs to suppress the immune system’s response. Since the immune system fights not only pathogens but also cancerous cells, immunosuppression can lead to a rapid recurrence of the disease originating from the remnants of the malignant cells left in the body. The hope for a change lies in tissue engineering research, which promises to create an artificial replacement organ using the patient’s own cells, thereby reducing the need for immunosuppression.

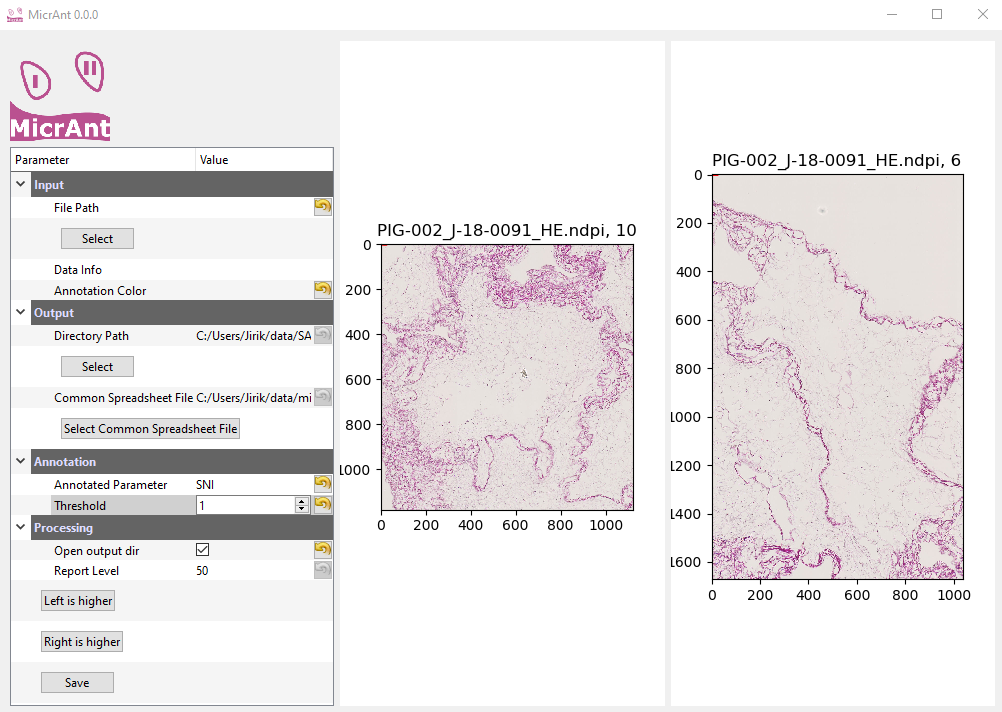
An important step in our approach to the production of an artificial organ is the preparation of an inanimate skeleton of the liver (scaffold), which is obtained from the liver of a domestic pig and is intended for subsequent colonization by living cells. To evaluate the quality of this scaffold, it is necessary to distinguish the areas of the liver lobules and their surroundings (septa). To follow the previously described quality assessment methodology, it has hitherto been necessary to manually label parts of the scaffold samples in histological slides stained with hematoxylin and eosin. In cooperation with colleagues from the Biomedical Center of the Faculty of Medicine in Pilsen of Charles University and Universitätsklinikum Jena, we designed an algorithm that produces the label automatically. The algorithm, which is based on convolutional neural networks, was published in the Sensors journal (Q1, IF=3.275).

Compared to classical methods of computer vision, convolutional neural networks usually offer better results, but require a considerable amount of training data. Therefore, we designed a two-phase training procedure. In the first phase, we use the methods of classical computer vision for semi-automatic segmentation using texture features. In this phase, we use training datasets where less than 5% of the image area is annotated. The output data are then used in the second phase for training a neural network. The architecture of the neural network is inspired by the U-Net network. After the training, full segmentation is produced automatically.

Two-phase training procedure
Automatic histological image processing allows extensive skeletal quality measurements to be made. An important benefit of this method is the repeatability of measurements and their independence from the human factor, once the network is trained. In the follow-up research, our team is going to integrate the proposed method into a freely available application, which will make it possible to compare the results of laboratories from all over the world.
References
[Liska2019]
Liška V, Moulisová V, Pálek R, Rosendorf J, Červenková L, Bolek L, Třeška V. Repopulation of decellularized pig scaffolds: Promising approach for liver tissue engineering. Rozhl Chir. 2019 Fall;98(10):388-393. English. PMID: 31842567.
[Moulisova2020]
Moulisová V, Jiřík M, Schindler C, et al. Novel morphological multi-scale evaluation system for quality assessment of decellularized liver scaffolds. Journal of Tissue Engineering. January 2020. doi:10.1177/2041731420921121
[Jirik2020]
Jirik, M.; Gruber, I.; Moulisova, V.; Schindler, C.; Cervenkova, L.; Palek, R.; Rosendorf, J.; Arlt, J.; Bolek, L.; Dejmek, J.; Dahmen, U.; Zelezny, M.; Liska, V. Semantic Segmentation of Intralobular and Extralobular Tissue from Liver Scaffold H&E Images. Sensors 2020, 20, 7063.